|
Miniature High Precision Motion Guide and Robotic
Straight line mechanism / Linear motion / Motion control / Linear stage / Linear-motion bearing / Linear actuator / Linear motor / Linear encoder / Cartesian coordinate robot / Linear robot / Robotic arm / Serial Robot Arm / Serial manipulator / Degrees of freedom (mechanics) / Robot end effector / Cobot / Collaborative robot / CNC machine / 3D printing / Milling (machining) / Pick and place / Automated storage and retrieval system (ASRS or AS/RS) / Liquid handling robot / Pipette / Syringe / Autosampler / High-throughput Screen Screening ( HTS ) / Flow Cytometer / Cherry Picking / Titration / Reciprocating pump / Metering pump
 


 


Bio-Technology Raw Materials and Consumables from Taiwan
Knowledge Bases :
Applications
|
Roberts Linkage.
Links of the same color are the same length.
A Straight line mechanism;is a mechanism that produces a perfect or approximate straight line. The first mechanism known to produce straight line motion was an approximation, described in 1784 by James Watt.
They are used in a They are used in a variety of applications, such as engines, vehicle suspensions, walking robots, and rover wheels.
|
Linear motion,
also calledrectilinear motion, is
one-dimensional motion along
a straight line,
and can therefore be described mathematically using only one spatial dimension.
The linear motion can be of two types: uniform linear motion with constant velocity or
zero acceleration;
;
and non-uniform linear motion with variable velocity or non-zero acceleration. |
Motion control is
a sub-field of automation,
encompassing the systems or sub-systems involved in moving parts of machines in a controlled manner. Motion control systems are extensively used in a variety of fields for automation purposes, including precision engineering, micromanufacturing, biotechnology,
and nanotechnology. |
A linear
stage or translation
stage is
a component of a precise motion system used
to restrict an object to a single axis of motion. The term linear slide is
often used interchangeably with "linear stage", though technically "linear slide" refers to a linear motion bearing,
which is only a component of a linear stage. All linear stages consist of a platform and a base, joined by some form of guide or linear bearing in such a way that the platform is restricted to linear motion with respect to the base. In common usage, the term linear stage may or may not also include the mechanism by which the position of the platform is controlled relative to the base.
|

A linear-motion bearing;or linear slide is a bearing designed to provide free motion in one direction. There are many different types of linear motion bearings.
Motorized linear slides such as machine slides, X-Y tables, roller tables and some dovetail slides are bearings moved by drive mechanisms. Not all linear slides are motorized, and non-motorized dovetail slides, ball bearing slides and roller slides provide low-friction linear movement for equipment powered by inertia or by hand. All linear slides provide linear motion based on bearings, whether they are ball
bearings, dovetail bearings, linear roller bearings, magnetic or fluid bearings. X-Y tables, linear stages, machine slides an, machine slides and other advanced slides use linear motion bearings to provide movement along both X and Y multiple axis.
|
A linear
actuator is
an actuator that
creates motion in a straight line, in contrast to the circular motion of a conventional electric motor.
Linear actuators are used in machine tools and industrial machinery, in computer peripherals such
as disk drives and printers, in valves and dampers,
and in many other places where linear motion is required. Hydraulic or pneumatic cylinders
inherently produce linear motion. Many other mechanisms are used to generate linear motion from a rotating motor.
|

A linear motor is an electric motor that has had its stator and rotor "unrolled", thus, instead of producing a torque (rotation),
it produces a linear force along its length. However, linear motors are not necessarily straight. Characteristically, a linear motor's active section has ends, whereas more conventional motors are arranged as a continuous loop.
A typical mode of operation is as a Lorentz-type actuator, in which the applied force is linearly proportional to the current and the magnetic field
|

A linear
encoder is
a sensor, transducer or
readhead paired with a scale that
encodes position. The sensor reads the scale in order to convert the encoded position into an analog or digital
signal, which can then be decoded into position by a digital readout (DRO) or motion controller.
|

A Cartesian
coordinate robot (also
called linear robot)
is an industrial robot whose
three principal axes of
control are linear (i.e. they move in a straight line rather than rotate) and are at right angles to
each other. The
three sliding joints correspond
to moving the wrist up-down, in-out, back-forth. Among other advantages, this mechanical arrangement simplifies the robot control arm
solution. It has high reliability and precision when operating in three-dimensional space. As
a robot coordinate system, it is also effective for horizontal travel and for stacking bins.
|

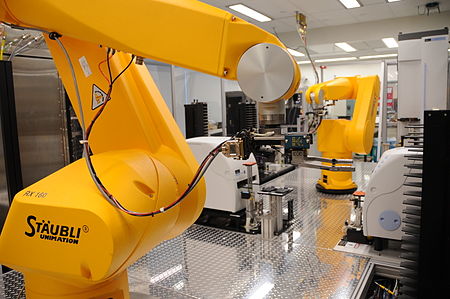
A robotic
arm is
a type of mechanical arm,
usually programmable,
with similar functions to a human arm;
the arm may be the sum total of the mechanism or may be part of a more complex robot.
The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot)
or translational (linear) displacement. The
links of the manipulator can be considered to form a kinematic chain.
The terminus of the kinematic chain of the manipulator is called the end effector and
it is analogous to the human hand.
However, the term "robotic hand" as a synonym of the robotic arm is often proscribed. |

Serial manipulators are the most common industrial robots and they are designed as a series of links connected by motor-actuated joints that extend from a base to an end-effector. Often they have an anthropomorphic arm structure described as having a "shoulder", an "elbow", and a "wrist".
Serial robots usually have six joints, because it requires at least six degrees of freedom to place a manipulated object in an arbitrary position and orientation in the workspace of the robot.
A popular application for serial robots in today's industry is the pick-and-place assembly robot, called a SCARA robot, which has four degrees of freedom.
|

Inphysics,
the degrees of freedom (DOF)
of a mechanical system is
the number of independent parameters that
define its configuration or state. It is important in the analysis of systems of bodies in mechanical engineering, structural
engineering, aerospace
engineering, robotics,
,
and other fields. |

In robotics, an end effector is the device at the end of a robotic arm, designed to interact with the environment. The exact nature of this device depends on the application of the robot.
In the strict definition, which originates from serial robotic manipulators, the end effector means the last link (or end) of the robot. At this endpoint, the tools are attached. In a wider sense, an end effector can be seen as the part of a robot that interacts with the work environment. This does not refer to the wheels of a mobile robot or the feet of a humanoid
robot, which are not end effectors but rather part of a robot's mobility.
|
A cobot,
or collaborative robot,
is a robot intended
for direct human robot interaction within
a shared space, or where humans and robots are in close proximity. Cobot applications contrast with traditional industrial robot applications
in which robots are isolated from human contact. Cobot
safety may rely on lightweight construction materials, rounded edges, and inherent limitation of speed and force, or on sensors and software that ensure safe behavior. |
|
Applications : |
|
|
|
Numerical control (also computer numerical control,
and commonly called CNC) is the automated
control of machining tools (such as drills, lathes, mills, grinders, routers and 3D
printers) by means of a computer.
A CNC machine processes a piece of material (metal, plastic, wood, ceramic, or composite) to meet specifications by following coded programmed instructions and without a manual operator directly controlling the machining operation.
|

3D printing oradditive
manufacturing is
the construction of
a three-dimensional object from
a CAD model
or a digital 3D model. It
can be done in a variety of processes in which material is deposited, joined or solidified under computer control, with
with
material being added together (such as plastics, liquids or powder grains being fused), typically layer by layer. |

Milling is
the process ofmachining using
rotary cutters to
remove material by
advancing a cutter into a workpiece.
This may be done varying direction on
one or several axes, cutter head speed, and pressure. Milling
Milling
covers a wide variety of different operations and machines, on scales from small individual parts to large, heavy-duty gang milling operations. It is one of the most
|

An automated storage and retrieval system (ASRS or AS/RS) consists of a variety of computer-controlled systems for automatically placing and retrieving loads from defined storage locations. Automated storage and retrieval systems (AS/RS) are typically used in applications where:
- There is a very high volume of loads being moved into and out of storage
- Storage density is important because of space constraints
- No value is added in this process (no processing, only storage and transport)
- Accuracy is criticaAccuracy is critical because of potential expensive damages to the load
|
A liquid
handling robot is
used to automate workflows in life science laboratories. It is arobot that
dispenses a selected quantity of reagent,
samples or other liquid to a designated container.
The simplest version simply dispenses an allotted volume of
liquid from a motorized pipette or syringe;
more complicated machines can also manipulate the position of the dispensers and containers (often a Cartesian coordinate robot,
such as the XYZ Triton Robot from
from
TriContinent Scientific) and/or integrate additional laboratory devices, such as centrifuges, microplate readers, heat sealers, heater/shakers, bar code readers, spectrophotometric devices, storage devices and incubators.
|

A
pipette (sometimes
spelled aspipett)
is a laboratory tool commonly used in chemistry, biology and medicine to
transport a measured volume of liquid, often as a media dispenser.
Pipettes come in several designs for various purposes with differing levels of accuracy and precision,
from single piece glass pipettes to more complex adjustable or electronic pipettes. Many pipette types work by creating a partial vacuum above
above
the liquid-holding chamber and selectively releasing this vacuum to draw up and dispense liquid. Measurement accuracy varies greatly depending on the instrument. |

A syringe is
a simplereciprocating pump consisting
of a plunger (though in modern syringes, it is actually a piston)
that fits tightly within a cylindrical tube called a barrel. The
plunger can be linearly pulled and pushed along the inside of the tube, allowing the syringe to take in and expel liquid or gas through
a discharge orifice at
the front (open) end of the tube. The open end of the syringe may be fitted with a hypodermic needle,
a nozzle or tubing to
direct the flow into and out of the barrel. Syringes are frequently used in clinical medicine to
administer injections,
infuse intravenous therapy into
the bloodstream, apply compounds such as glue or lubricant,
,
and draw/measure liquids.
|

An autosampler is commonly a device that is coupled to an analytical instrumentpan>providing samples periodically for analysis. An autosampler can also be understood as a device that collects samples periodically from a large sample source, like the atmosphere or a lake, for example.
Autosamplers enable substantial gains in productivity, precision and accuracy in many analytical scenarios, and therefore are widely employed in laboratories.
.
|
High-throughput screening (HTS)
is a method for scientific experimentation especially
used in drug discovery and
relevant to the fields of biology, materials
science and chemistry. Using robotics,
data processing/control software, liquid handling devices, and sensitive detectors, high-throughput screening allows a researcher to quickly conduct millions of chemical, genetic, or pharmacological tests. Through this process one can quickly recognize active compounds, antibodies, or genes that modulate a particular biomolecular pathway. The results of these experiments provide starting points for drug design and for understanding the noninteraction or role of a particular location. |

Flow cytometry (FC)
is a technique used to detect and measure physical and chemical characteristics of a population of cells or
particles.
Flow cytometry is routinely used in basic research, clinical practice, and clinical trials. Uses for flow cytometry include:
|

Cherry picking, suppressing evidenceass="style330">, or the fallacy of incomplete evidence is the act of pointing to individual cases or data that seem to confirm a particular position while ignoring a significant portion of related and similar cases or data that may contradict that position. Cherry picking may be committed intentionally or unintentionally.
The term is based on the perceived process of harvesting fruit, such as cherries. The picker would . The picker would be expected to select only the ripest and healthiest fruits
|

Titration (also
known astitrimetry and volumetric
analysis) is a common laboratory method of quantitative chemical
analysis to
determine the concentration of
an identified analyte (a
substance to be analyzed). A reagent,
termed the titrant or titrator, is
prepared as a standard solution of
known concentration and volume. The titrant reacts with a solution of analyte (which
may also be termed the titrand)
)
to determine the analyte's concentration. Th |

A reciprocating
pump is
a class of positive-displacementpumps that
includes the piston pump, plunger
pump, and diaphragm
pump. Well maintained, reciprocating pumps can last for decades. Unmaintained, however, they can succumb to wear and tear. It is often used where a relatively small quantity of liquid is
to be handled and where delivery pressure is
is
quite large. In reciprocating pumps, the chamber that traps the liquid is a stationary cylinder that contains a piston or plunger.
|
metering pump moves a precise volume of liquid in a specified time period providing an accuratevolumetric flow rate Delivery of fluids in precise adjustable flow rates is sometimes called metering. The term "metering pump" is based on the application or use rather than the exact kind of pump used, although a couple types of pumps are far more suitable than most other types of pumps.
Although metering pumps can pump water, they are often used to pump chemicals, solutions, or other liquids. Many metering pumps are rated to be able to pump into a high discharge pressure. They are typically made to meter at flow
|
Key Words :
#StraightLineMechanism #LinearMotion #MotionControl #LinearStage #LinearMotionBearing #LinearActuator #LinearMotor #LinearEncoder #CartesianCoordinateRobot #LinearRobot #RoboticArm #SerialRobotArm #SerialManipulator #DegreesOfFreedom(mechanics) #RobotEndEffector #Cobot #CollaborativeRobot #CNCMachine #3DPrinting #Milling(machining) #PickAndPlace #AutomatedStorageAndRetrievalSystem #ASRS #AS/RS) #LiquidHandlingRobot #Pipette #Syringe #Autosampler #High-throughputScreen #HTS #FlowCytometer #CherryPicking #Titration #ReciprocatingPump #MeteringPump
|